我無法說出SpaceX為何做出決定。但是,儘管三隻腳不會擺動,但四隻腳不太可能翻倒。 SpaceX已證明翻車是一個主要問題。
數學論壇的彼得森博士解釋了...
有不同的穩定性!保證三腳凳不會擺動,因為它的腿的末端始終形成一個平面。但是,一點點擺動只是一種不便。出於實際目的更重要, [三足式]凳比重腿的凳子穩定,因為它的重心在其底部更深:正多邊形的邊越多,則越大它的 apothem(從中心到邊緣中間的距離) 。更大的距離意味著保姆可以在任何方向上傾斜更遠而不會傾翻。因此,如果您不介意小費,但又不想摔倒在臉上,或者地板平整合理,那麼腿越多越好。
,為簡單起見,想像一下火箭腿所形成的圓的半徑為1。三個著陸墊位於等邊三角形的頂點上。四個頂點位於一個正方形的頂點上。
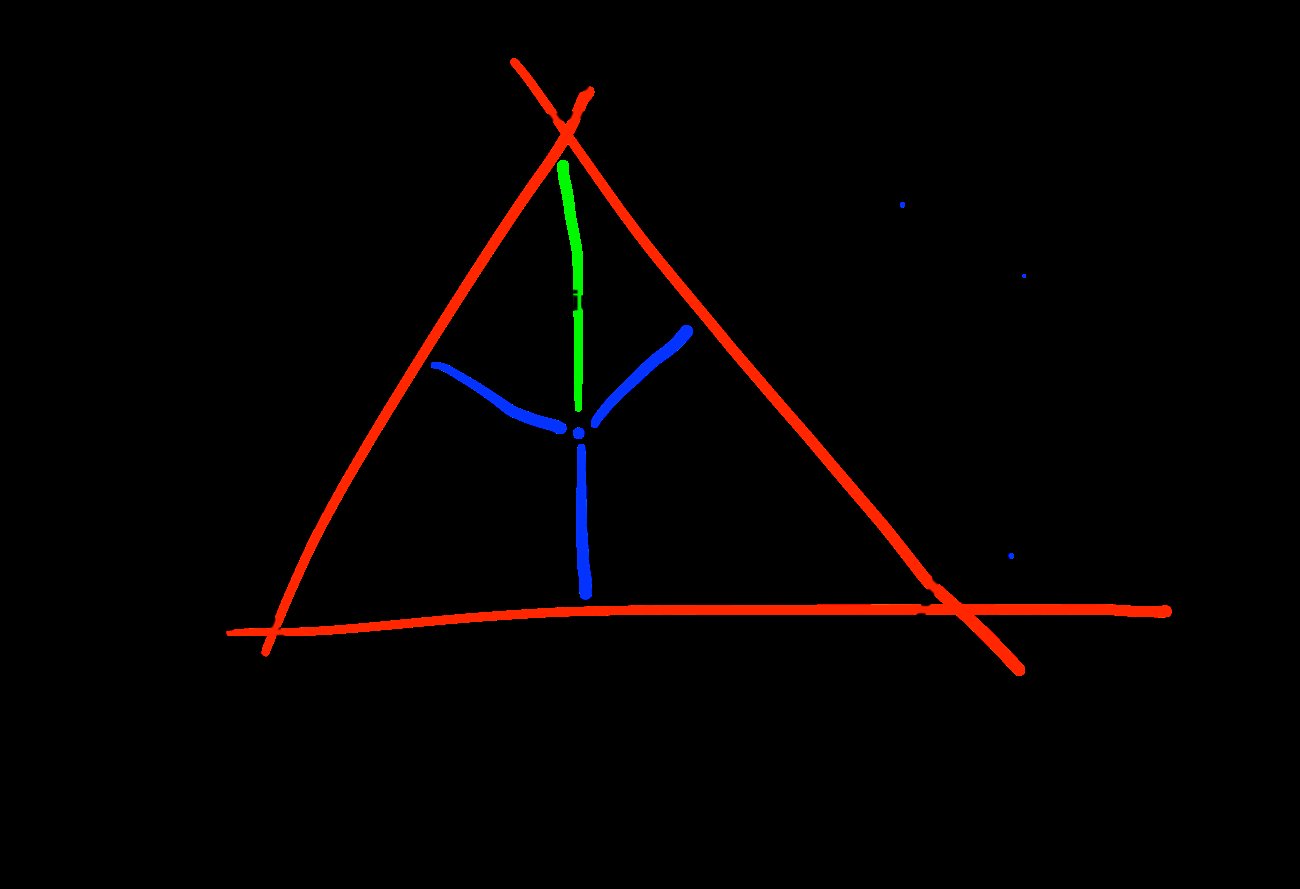
讓我們全部假設是一個等邊三角形。藍線是阿特姆。綠線是半徑。它們形成一個內角為120/2或60度的三角形。我們可以使用罪孽定律來解決該問題。
$$ \ frac {a} {\ sin 30} = \ frac {1} {\ sin 90} $$ span> $$ a = \ frac {1 * \ sin 30} {\ sin 90} $$ span> $$ a = 0.5 $$ span>
現在有四條腿。
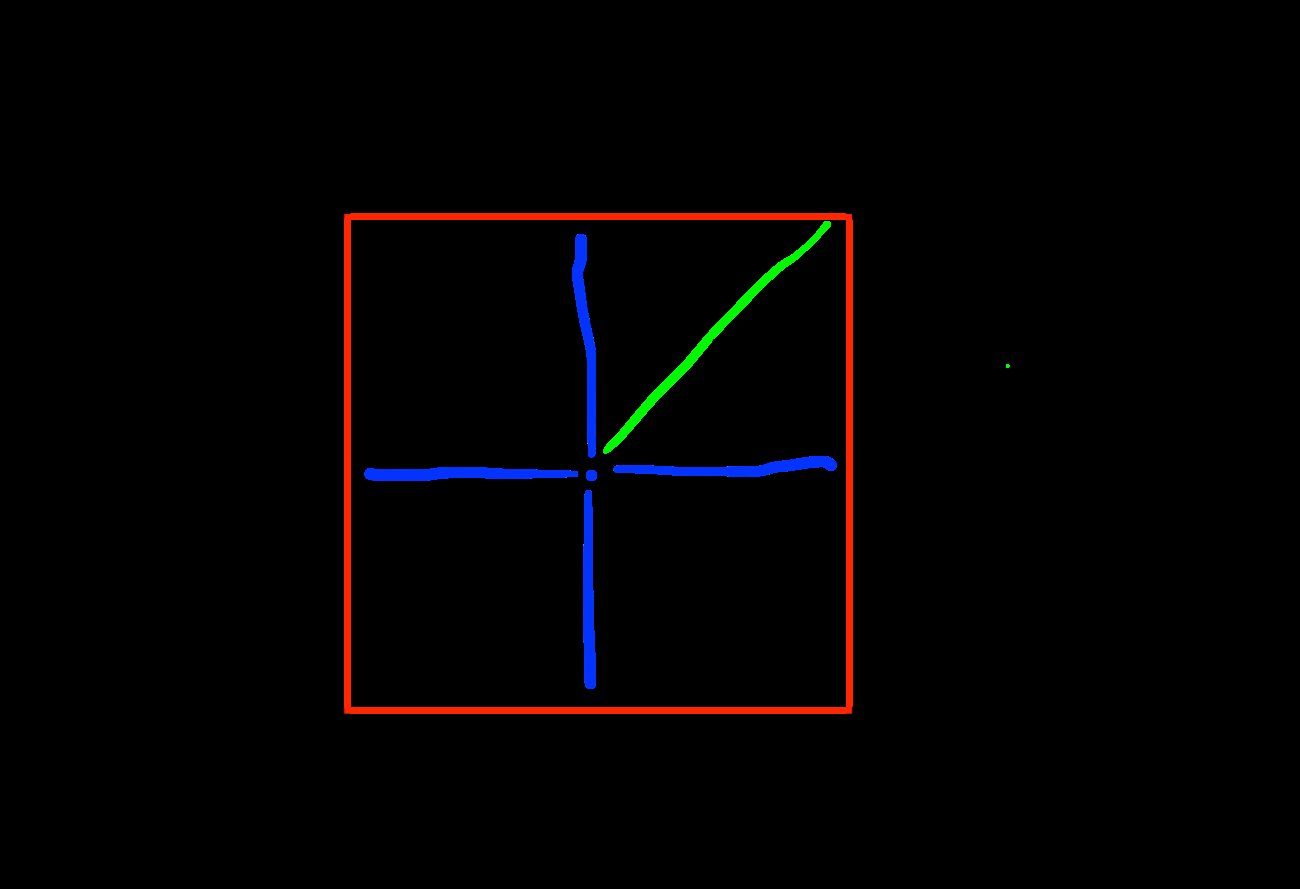
相同的想法,但是現在角度為45度。
$$ \ frac {a} {\ sin 45} = \ frac { 1} {\ sin 90} $$ span> $$ a = \ frac {1 * \ sin 45} {\ sin 90} $$ span>
$$ a = 0.707 $$ span>
在5條腿上的波峰係數是0.809。六點是0.866。基本公式為 $ \ sin(90-\ frac {180} {n})$ span>。
但是如果我們只是用了三個更長的腿?重量會比四個短的重量輕嗎?換句話說,我們需要使三足火箭的波峰強度達到0.707。降落墊必須進一步擴展多少?將 a 設置為0.707並求解 r 。
$$ \ frac {r} {\ sin 90} = \ frac {0.707} {\ sin 30} $$ span> $$ r = \ frac {0.707 * \ sin 90} {\ sin 30} $$ $$ r = 1.414 $$ span>
所有三個著陸墊的散佈比四個要多40%。對於三個腿,距離要比120%大,這是在我們認為腿成一定角度之前,因此需要更長的時間才能使護墊離火箭中心40%的距離。更長的時候,他們需要變得更強壯甚至更重。
更多的腿可以使收益迅速減少。通用公式只是 $ \ frac {a2} {a1} $ span>或 $ \ frac {\ sin angle2} {\ sin angle1} $ span>。
- 使3條腿匹配4。 $ \ frac {\ sin 45} {\ sin 30} $ span>或1.414。
- 使4條腿匹配5。 $ \ frac {\ sin 54} {\ sin 45} $ span>或1.144
- 使5條腿匹配6。 $ \ frac {\ sin 60} {\ sin 54} $ span>或1.070
只需將四條腿的寬度加寬15%即可達到五條腿的穩定性,即總長為60%,這使得使用四根更長,更強的腿比五個短腿更經濟。